电机包括发电机和电动机,这里偏重于电动机 由于电机工作状态的可逆性,同一台电机既可作发电机又可作电动机,包括交流的直流的
都在用什么样的电机 如何选择电机
- 根据电源 交流 直流。
- 直流发电机将机械能转化为直流电,直流电动机使用直流供电。直流电动机是依靠直流工作电压运行的电动机,广泛应用于收录机、录像机、影碟机、电动剃须刀、电吹风、电子表、玩具等。直流电机又分为无刷和有刷(有刷的又分为永磁和电磁)。
- 无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传统的接触式换向器和电刷。它具有可靠性高、无换向火花、机械噪声低等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中。录放机中是永磁式有刷直流电动机
- 交流电机分为单相和三相,交流电机一般采用三相制,因为三相交流电机与单相电机相比,无论在性能指标,原材料利用和价格等方面均有明显的优越性。同样功率的三相电机比单相电机体积小,重量轻,价格低。单相电机的转矩是脉动的,噪声也比较大,但所需的电源比较简单,特别是在家庭中使用十分方便。因此小型家用电机和仪用电机多采用单相电机
- 交流电机又分为同步和异步,同步顾名思义就是说他的里面的转子和定子的转速是一样的 异步就是不同的。异步电机(感应电机)的工作原理是通过定子的旋转磁场在转子中产生感应电流,产生电磁转矩,转子中并不直接产生磁场.因此,转子的转速一定是小于同步速的(没有这个差值,即转差率,就没有转子感应电流),也因此叫做异步电机. 而同步电机转子本身产生固定方向的磁场(用永磁铁或直流电流产生),定子旋转磁场”拖着”转子磁场(转子)转动,因此转子的转速一定等于同步速,也因此叫做同步电机.
- 交流异步电动机是领先交流电压运行的电动机,广泛应用于电风扇、电冰箱、洗衣机、空调器、电吹风、吸尘器、油烟机、洗碗机、电动缝纫机、食品加工机等家用电器及各种电动工具、小型机电设备中
- 同步电动机主要用于大型机械,如鼓风机、水泵、球磨机、压缩机、轧钢机以及小型、微型仪器设备或者充当控制元件
- 步进电动机主要应用在数控机床制造领域,由于步进电动机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以一直被认为是最理想的数控机床执行元件。除了在数控机床上的应用,步进电机也可以用在其他的机械上,比如作为自动送料机中的马达,作为通用的软盘驱动器的马达,也可以应用在打印机和绘图仪中。
- 玩具电机呢?
- 伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。
电机控制中CPU用的资源
PWM 三相PWM 6路 互补
无刷直流电机 BLDC
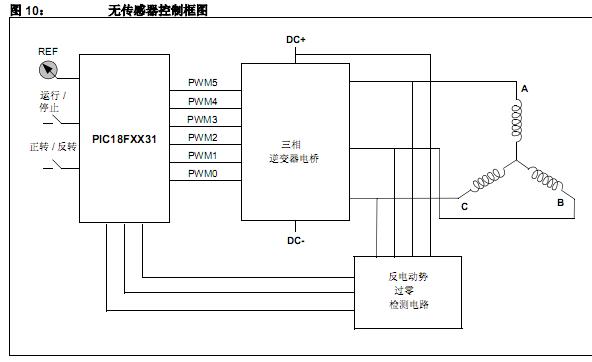
无刷 换向需要通过电子方式输入 input: on/off fwd/rev keys 调速 AD 位置传感器(霍尔等) 或无传感器,反电动势检测电路 电流反馈检测 AD 光电编码器 输出: PWM接驱动放大电路 换相 占空比可调速 PWM 到IGBT driver 要让电机转动起来,必须知道电机转子目前所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序
- 采用位置传感器确定电机转子位置

与有刷直流电机不同,无刷直流电机使用电子方式换向。要使 BLDC转起来,必须要 按照一定的顺序给定子通电,那么我们就需要知道转子的位置以便按照通电次序给相应的定 子线圈通电。定子的位置是由嵌入到定子的霍尔传感器感知的。通常会安排 3 个霍尔传感器 在转子的旋转路径周围。无论何时,只要转子的磁极掠过霍尔元件时,根据转子当前磁极的 极性霍尔元件会输出对应的高或低电平,这样只要根据 3 个霍尔元件产生的电平的时序就可 以判断当前转子的位置,并相应的对定子绕组进行通电。 霍尔效应:当通电导体处于磁场中,由于磁场的作用力使得导体内的电荷会向导体的一 侧聚集,当薄平板通电导体处于磁场中时这种效应更为明显,这样一侧聚集了电荷的导体会 抵消磁场的这种影响,由于电荷在导体一侧的聚集,从而使得导体两侧产生电压,这种现象 就称为霍尔效应,E.H霍尔在 1879 年发现了这一现象,故以此命名。 位置传感器常用:
- 霍尔传感器(磁敏式传感器) 采用磁敏式位置传感器的无刷直流电动机,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。
霍尔传感器输出信号接入捕捉引脚CAP,或者也可以用常规三个端口
- 光电式位置传感器
采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯泡。转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号。 光电式位置传感器是利用光电效应制成的,由跟随电机转子一起旋转的遮光板和固定不动的光源及光敏晶体管等部件组成。由绝对式编码器和增量式编码器之分。增量式编码器精度高,多用于精密控制中,价格昂贵,且需要附加初始位置定位装置;绝对式编码器价格低廉,不需要初始位置定位,但精度不高,可用于对精度要求不高的速度控制中。光电式位置传感器比较稳定,体积小,重量轻,但是对环境要求比较高。 电机内部装有能感应磁场的霍尔传感器(hall-sensor),做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。 ,如 下(图二) inverter中之ah、bh、ch(这些称为上臂功率晶体管)及al、bl、cl(这些称为下臂功率晶体管),使电流依序流经电机线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/逆时转动。当电机转子转动到hall-sensor感应出另一组信号的位置时,控制部又再开启下一组功率晶体管,如此循环电机就可以依同一方向继续转动直到控制部决定要电机转子停止则关闭功率晶体管(或只开下臂功率晶体管);要电机转子反向则功率晶体管开启顺序相反。 基本上功率晶体管的开法可举例如下: ah、bl一组→ah、cl一组→bh、cl一组→bh、al一组→ch、al一组→ch、bl一组 但绝不能开成ah、al或bh、bl或ch、cl。此外因为电子零件总有开关的响应时间,所以功率晶体管在关与开的交错时间要将零件的响应时间考虑进去,否则当上臂(或下臂)尚未完全关闭,下臂(或上臂)就已开启,结果就造成上、下臂短路而使功率晶体管烧毁。
- 不用位置传感器
通过测量反向电动势确定转自位置 增加反电动势过零检测电路 也可以通过定子绕组产生的反感生电动势来检测转子的位置,而省去位置传感器,但是电机启动时,转速太小,反感生电动势信号太小而无法检测 反电动势过零检测 检测换相点
当某相反电动势反向的时候霍尔传感器的输出也跟着 变化。理想状态下,霍尔元件的输出会在相反电动势过零的时候发生改变,实际应用时会有 一段小的延迟,这种延迟可以通过微控制器补偿 还有一方面需要考虑:当电机转速比较低的时候,反电动势会比较小,以致过零检测电 路无法正常检测,这个时候在电机启动阶段就需要使用开环控制,当电机启动到产生可以过 零检测的反电动势转速时,系统就需要切换到过零检测控制模式,进行闭环控制。最低的过 零检测转速可以根据电机的反电动势常量计算出来。根据这个原理,可以去除霍尔元件以及 因其安装的辅助磁体,这样就可以简化制造节约成本。另外,除去了霍尔元件的电机可以安 装在一些粉尘和油污比较大的地方而无须为保证霍尔的正常工作而定时进行清理,与此同 时,这种免维护电机还可以安装在人很难触及的地方。 对于采用两相导通三相六拍运行方式的无刷直流电动机而言,三相绕组中在任意时刻总 有一相处于断开状态、检测断开相的反电势信号,当其过零点时,转子直轴与该相绕组重合, 再经过30O 电角度依照开通顺序进行换相。故只要检测到各相反电势的过零点,即可获知转子 的若干个关键位置,这就是反电势法的基本原理。 但是,绕组反电势是难以直接测取的物理量。因此,通常的做法是通过检测电机端电压 信号,进行比较来间接获取绕组反电势信号的过零点,从而得到转子的位置信号。故这种方 法又称为“端电压法”
- 功率驱动部分
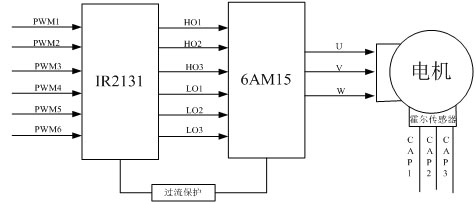
要转化成三相的?为什么? PWM 模块用于驱动IGBT 模块,然后去控制电机 6路PWM输出连接到3对MOSFET驱动器(如IR2101S) ,最终链接到6个MOSFET(IRFR2407) PWM的占空比还是可以调节速率的 前置驱动芯片采用的是IR公司的MOSFET驱动芯片IR2131,具有集成度高、可靠性好、速度快、过流欠压保护、调试方便等特点。IR2131 内部设计有过流、过压及欠压保护。 microchip也有驱动器,TC1426反向 TC1427不反向 功率驱动电路采用24V供电,驱动电路与电机的连接采用三相全桥方式,电机工作在三相六状态模式下。以任一时刻电机只有两相导通的方式来控制换流元件。PWM调制的方式是软斩波方式,即导通时下桥臂功率管始终保持开状态,上桥臂功率管的开关由PWM信号决定。功率开关管采用HITACHI公司的集成功率开关器件6AM15,其内部集成3个N型MOSFET管和P型MOSFET管,构成三相全桥功率开关电路。与采用六个分立MOSFET管相比,有利于提高集成度,减少电路板面积,增加可靠性。每个MOSFET管自带超快恢复二极管,在MOSFET管关闭期间起反向续流作用。
电机的绕组都是有一相为正向通电、 一相为反向通电和另外一相为不通电
获取调速信息 AD转换
测速进行反馈控制
我们可以通过闭环测量当前电机的转速而达到控制电机的转速的目的,我们通过计算期 望转速和实际转速的误差,然后使用PID算法去调节 PWM 的占空比以达到控制电机转速的 目的。 对于低成本,低转速的应用场合,可以使用霍尔传感器获得转速反馈。利用 PIC18FXX31 微控制器本身的一个定时器去测量两个霍尔元件输出信号,然后根据这个信号得出实际的转 速。 在高转速应用场合,我们可以在电机上装上光电编码器,可以利用其输出相差 90°的 信号进行转速和转向的测量。通常,光电编码器还可以输出 PPR 信号,使得可以进行较精 确的转子定位,编码器的编码刻度可以上百甚至上千,编码刻度越多,精度越高。
- 电流反馈电路?
电流反馈电路 采用基于磁补偿原理的HoneyWell霍尼韦尔公司的CSNE151-100这款多量 程小体积电流传感器,它可以测量直流、交流或者脉动电流,原/副边电路之间 电气绝缘性好,绝缘电压高达5000V。传感器的供电为±15V的直流电源,输出 一个正比于测量电流的模拟电压,其以供电直流电源的地作为参考地的。需对两 路定子电流进行 AD 转换,使调理后的电压限制在 0~5V 之间,满足 dsPIC 的 A/D转换要求 电流检测电路由霍尔元件、运算放大器和DSP内部A/D转换器组成。由于输出电流信号较弱,需用同相放大器放大。对于三相电机,电流采样只需在电机三相绕组的任意两相上安装两个霍尔元件,来检测电流信号。由于存在下列关系式:ia+ib+ic=0,因此只需检测任意两相的电流值,就可得到另外一相的电流值。在每个PWM周期对电流采样一次,采样时刻应在PWM周期的”开”期间中部,通过DSP定时器启动ADC转换来实现。 单片机实际连接案例 对电机的控制主要使用F2812片上的两个电机控制专用外设——EVA和EVB。利用通用定时器T1配合PWM发生器来产生驱动功率器件所需的六路PWM信号,通过GPIO接口将三路电机霍尔传感器信号输入捕获单元,从而获取三个转子的位置,进而控制电机的换相和进行电机转速的计算。两个12位AD模块对相电流信号Iphase和输入的速度调节电压信号Vref进行转换和存储,分别作为电流环的反馈信号和速度环的参考信号。通过片上的通用输入输出接口(GPIO),实现与功率驱动部分的连接,输出启动停止信号,正反转信号,紧急制动信号等,同时接收输入的保护信号,故障信号等。通过片上的SCI模块实现与计算机的通信,接收上位机的控制指令。
其他:
了解正交编码器 正交编码器(又名增量式编码器或光电式编码器),用于检测旋转运动系统的位置和速度。正交 编码器可以对多种电机控制应用实现闭环控制 是编码器中的一种,通过增量,可以看出位置的变化信息 典型的增量式编码器包括一个放置在电机传动轴上的开槽的轮子和一个用于检测该轮上槽口的发射器/ 检测器模块。通常,有三个输出,分别为:A相、B相和索引(INDEX),所提供的信息可被解码,用以提供有关电机轴的运动信息,包括距离和方向。 A相(QEA)和B相(QEB)这两个通道间的关系是惟一的。如果A相超前B相,那么电机的旋转方向被认为是正向的。如果A相落后B相,那么电机的旋转方向则被认为是反向的。第三个通道称为索引脉冲,每转一圈产生一个脉冲,作为基准用来确定绝对位置。 位置传感器 1提供换相依据 2转速反馈 PWM是单片机上常用的模拟量输出方法,通过外接的转换电路,可以将占空比不同的脉冲转变成不同的电压,驱动直流电机转动从而得到不同的转速。 最常用的直流调速技术是PWM直流调速技术 通俗的说PWM就是波形,波形的波峰以波谷的比例关系成为占空比,我们可以通过PWM控制电机,音量控制,模拟控制等。 交流电动机?三相电机驱动?变频? 晶闸管/可控硅 IGBT是Insulated Gate Bipolar Transistor的英文缩写。可以翻译做绝缘栅双极晶体管。 IGBT是强电流、高压应用和快速终端设备用垂直功率MOSFET的自然进化。 IGBT是一种功率晶体,运用此种晶体设计之UPS可有效提升产品效能,使电源品质好、效率高、热损耗少、噪音低、体积小与产品寿命长等多种优点。
参考资料
microchip moter control.pdf

